Project for Robotics and Autonomous Systems course. A mobile manipulator is designed for a search and rescue scenario maze. Project included everything from mechanical design, modeling, object detection, localization, manipulation, object avoidance and so on. The project is realized within 10 weeks with a group of four. I implemented a particle filter based localization system from scratch, a map server and local map update algorithm, motor control and teleoperation applications and a state machine as a brain for system integration. I also helped my team mates and contributed to other sub-systems.
Small Size Robot Bases
Three small-sized affordable multi-purpose mobile robots were designed from scratch and built. It is aimed to realize swarm applications with the robots.
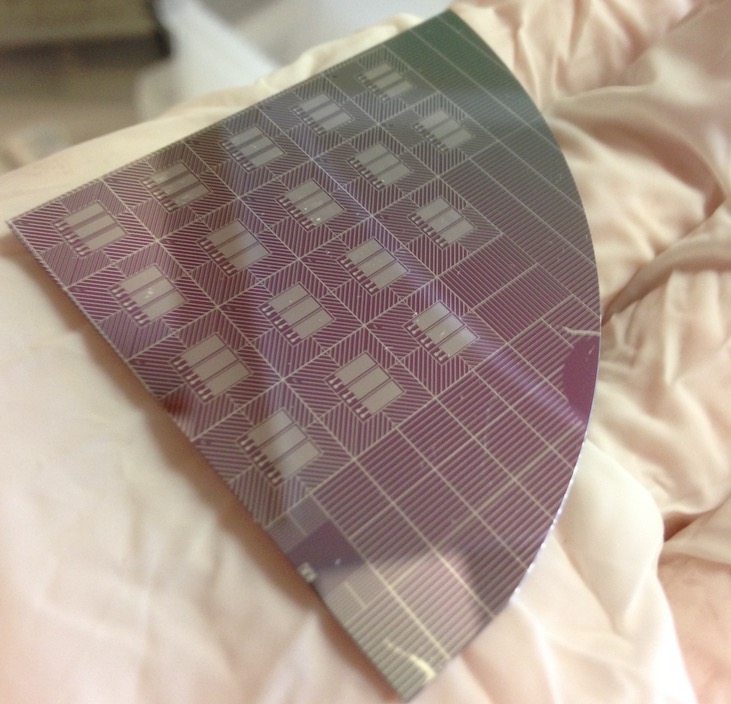
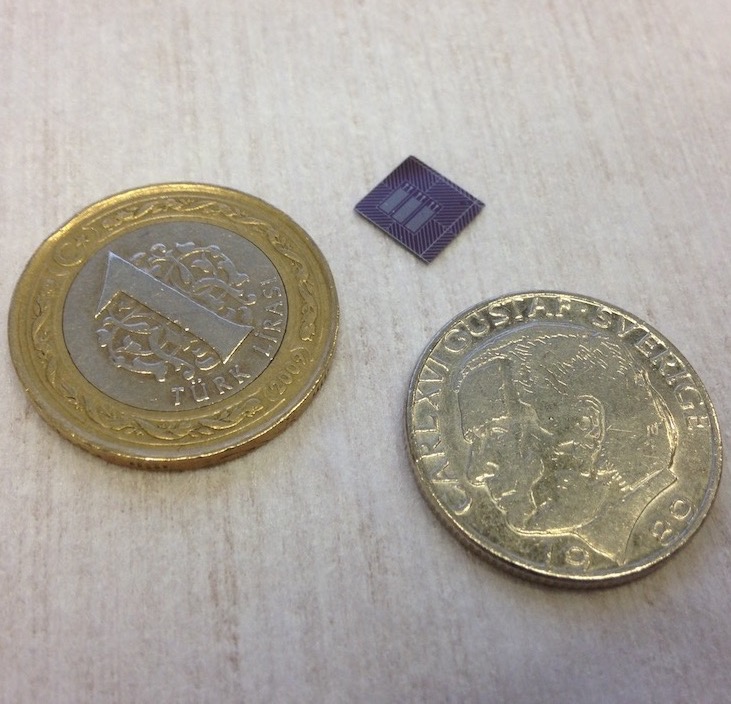
Fabrication of Thin Film Temperature and Gas Flow Sensor
Fabrication and characterization of thin film MEMS temperature and gas flow sensors in the clean-room laboratory at KTH. Here are the wafer that was processed and a single sensor chip;